Abstract
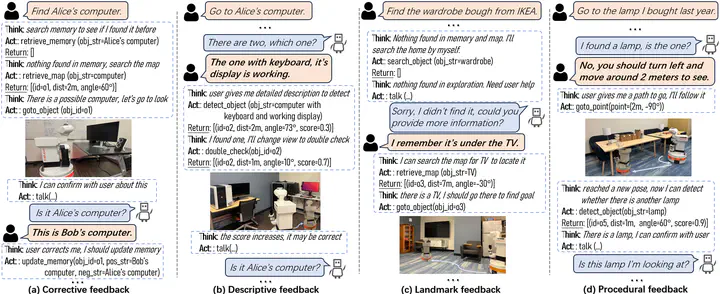
Zero-Shot Object Navigation (ZSON) enables agents to navigate towards open-vocabulary objects in unknown environments. The existing works of ZSON mainly focus on following individual instructions to find generic object classes, neglecting the utilization of natural language interaction and the complexities of identifying user-specific objects. To address these limitations, we introduce Zero-shot Interactive Personalized Object Navigation (ZIPON), where robots need to navigate to personalized goal objects while engaging in conversations with users. To solve ZIPON, we propose a new framework termed Open-woRld Interactive persOnalized Navigation (ORION), which uses Large Language Models (LLMs) to make sequential decisions to manipulate different modules for perception, navigation and communication. Experimental results show that the performance of interactive agents that can leverage user feedback exhibits significant improvement. However, obtaining a good balance between task completion and the efficiency of navigation and interaction remains challenging for all methods. We further provide more findings on the impact of diverse user feedback forms on the agents’ performance.
Run Peng
New PhD Student in Computer Science & Engineering
My research interests include embodied collaboration, reinforcement learning, and natural language processing.